2024年8月9日-11日,第三届机器学习、云计算与智能挖掘国际会议(MLCCIM 2024)在美丽的神农架成功召开。
本次会议由山东财经大学主办,爱迩思出版社(ELSP)承办,并得到中国民用航空飞行学院、北方工业大学伦敦布鲁内尔学院的鼎力协办。会议在神农架慢城国际酒店隆重举行,吸引了来自世界各地的专家学者、企业代表及研究人员共襄盛举。


大会开幕式由会议主席上海交通大学王贺升教授主持,清华大学孙富春教授作为大会主席对会议历史以及本届会议情况进行了介绍。山东财经大学张云峰副院长代表主办方致开幕辞,对远道而来的与会嘉宾表示热烈的欢迎,对会议的顺利召开表示祝贺,并强调了机器学习、云计算与智能挖掘在当前及未来社会经济发展中的重要作用,并期待通过此次会议推动相关领域的技术交流与合作。

会议邀请了众多业内知名学者进行主题报告。首先,清华大学孙富春教授带来了题为“具身智能的研究进展与思考”的报告。他详细介绍了基于大模型的具身智能在3C生产线中的应用。

IEEE Fellow、CAA Fellow中国科学院自动化研究所侯增广教授发表了“基于BCI的康复机器人环控制”的报告。他就康复机器人的多模态生物信号采集与处理、基于脑机接口的智能交互和人环控制方法等方面的一些实验和临床尝试与范例展开讨论,并展望未来的发展前景。

IEEE Fellow中国科学院大学赵冬斌教授带来了“基于学习的自动驾驶预测和规划”的报告。他首先介绍了有监督学习的自动驾驶汽车轨迹预测、综合预测和规划方法。然后,介绍了基于模型强化学习的预测和规划方法。最后,展示了具有良好泛化能力的大型视觉语言模型规划方法。

上海交通大学王贺升教授发表了题为”基于视觉的机器人定位、导航和控制“的报告。本报告重点介绍了服务机器人的两大核心功能:移动和操控。

南方科技大学Prof. Pietro S. Oliveto发表了题为“Computational Complexity Analysis of Sexual Evolution for the Design of Better General Purpose Algorithms for AI“的主旨报告。作为现代人工智能和机器学习技术核心的大量通用优化算法都受到了达尔文进化模型的启发,在本报告中展示了如何通过对此类算法的基础计算复杂性分析来了解它们的行为和性能。
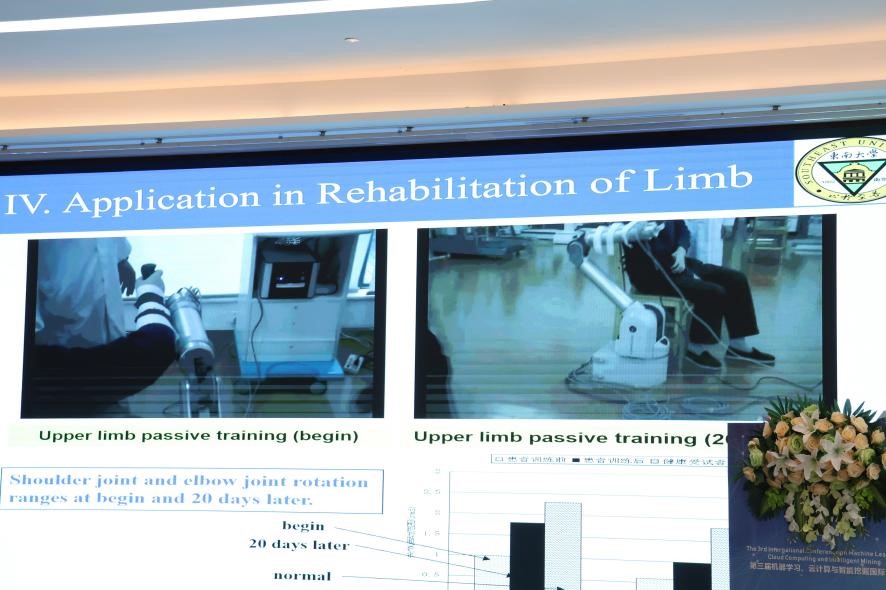
东南大学宋爱国教授线上发表了题为”人机交互力反馈遥操作机器人及其在康复领域的应用“的报告。他回顾了力反馈远程操作机器人的历史,并说明了力反馈远程操作机器人系统的结构。最后讨论了其四项关键技术,即力/触觉传感器技术、力反馈技术、控制策略和预测性虚拟环境建模。
在之后的分论坛环节,与会人员围绕机器学习、云计算与智能挖掘三大主题进行了深入研讨。


本次会议的成功举办,不仅为机器学习、云计算与智能挖掘领域的专家学者提供了一个交流与合作的平台,也为推动相关领域的技术创新与发展注入了新的动力。与会人员纷纷表示,将以此次会议为契机,加强交流与合作,共同推动机器学习、云计算与智能挖的繁荣发展。